


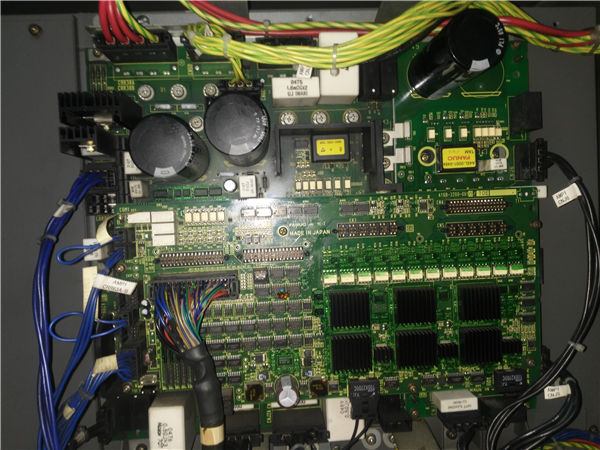
随着机器人技术的发展,工业机器人被广泛应用于汽车,食品,包装等行业,这不仅提高了产品的质量和生产效率,而且降低了生产成本。工业机器人的管理和维护是企业的一项重要任务。它对相关人员的素质提出了很高的要求。ABB机器人维修它不仅需要基础理论知识和管理能力,还需要能够安装,编程,调试和维护。维护工作。分析了工业机器人的典型应用和组成,为ABB机器人维修维护和维护提出了相应的解决方案,针对机器人维修人员的大间隙问题提出了相应的解决方案。

机器人示教器维修从面板上拆下插头连接器块。将螺丝刀的刀尖插入操作槽,向下推手柄。将信号线的末端插入线槽中。把螺丝刀拔出来。将插头连接块连接到面板上。不要将导线插入插头连接器的导线孔中,或将插头连接器块安装在面板上拔出;否则,面板可能会损坏。外部紧急停车信号、安全围栏信号、伺服关闭信号等信号采用重复输入,即使出现单一故障也能做出响应。这些重复输入信号的状态必须总是在同一时间改变。
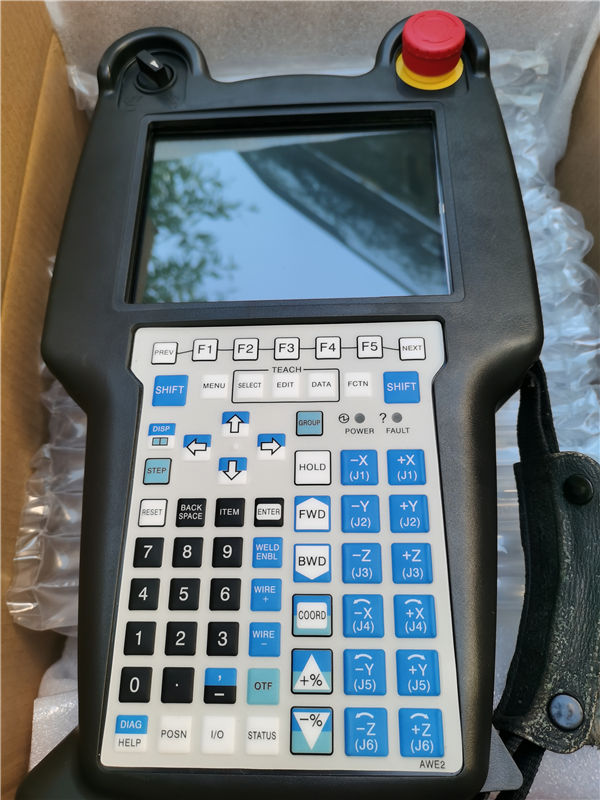
利用机器人动力学方程,将获得的关节空间力分量转换为关节位置坐标,机器人示教器维修实现直接教学。力传感器信号用于校正机器人的位置,机器人顺应性跟踪控制用于教导焊接机器人。可以发现,对于基于无扭矩传感器和扭矩补偿方法的直接教学,过程繁琐,动力学方程等等,并且在实际过程中难以进行扭矩补偿。由于机器人控制器等的闭合,基于力传感器的速度调节的直接教导难以应用于其他机器人。






 在线客服
在线客服 18842585256
18842585256 871198204@qq.com
871198204@qq.com